无锡精密铸造机械手的工作原理是什么?
时间:2025/8/9 3:00:00 来源:http://wx.qdtianqi.com/news1082134.html
青岛天启自动化工程有限公司为您免费提供无锡精密铸造机械手,无锡自动浇注机械手,无锡熔模铸造厂家等相关信息发布和资讯展示,敬请关注!
无锡精密铸造机械手主要由执行机构、驱动系统和控制系统三部分组成,其工作原理涉及自动化控制和机械运动等多个方面,以下为您详细介绍:

基本组成与结构
执行机构:是机械手的运动部分,包括手臂、手腕和夹具(如吸盘抓手)等,用于实现工件的抓取、移动和放置等操作。例如在精密铸造无锡制壳工艺中,机械手的手臂具备多段伸缩功能,可根据制壳工艺的需求进行调整;夹具采用高精度模具制造,确保夹持精度,内设有防滑垫,防止制壳材料在夹持过程中滑落。
驱动系统:为执行机构提供动力,通常采用气压、液压或电动(如伺服电机)等方式。以伺服电机驱动为例,它能确保机械手动作的精确性和稳定性,伺服电机与手臂、夹具等部分通过联轴器连接,实现动力传递。
控制系统:负责对机械手的运动轨迹、速度和力量进行精确控制,确保机械手能够按照预设的程序完成作业。一般采用PLC控制系统,通过传感器和控制器实现位置、速度、力的精确控制。部分精密铸造机械手还配备视觉系统,且该视觉系统与控制系统电性连接,可辅助机械手更好地识别工件位置和状态。
工作流程
1.运动控制:机械手通过高性能伺服电机带动精密研磨滚珠丝杆驱动,由高速直线导轨导向,实现沿直线滑轨方向的精确运动。这种运动方式具有静音、滚珠之间无摩擦磨损、重负荷以及润滑脂高保持性等特点,确保高速、静音、长寿命的运动表现。例如在一些精密铸造生产线上,机械手能够在复杂的环境下精准地移动到指定位置。
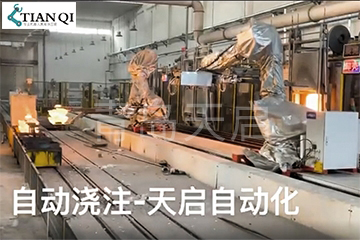
2.工件抓取与放置:在铸造过程中,机械手通过吸盘抓手或夹具自动抓取工件,并根据预设的程序将其传送到指定的铸造工位。在传送过程中,机械手会保持工件的稳定,以确保铸造质量。铸造完成后,机械手再将工件传送到下一个工位或下道工序,实现生产线的自动化。比如在精密铸造的制壳环节,机械手准确抓取制壳材料并放置到指定位置。
3.同步与协调:部分精密铸造机械手通常与无锡铸造设备的曲轴相连接,通过编码器实时监控铸造设备曲轴的角度,确保机械手与铸造设备的同步运行。在设备一个作业周期内,根据编码器反馈的数据控制伺服电机,使机械手的各条轴按照事先编好的运动轨迹进行准确精密的搬送定位。这种同步与协调机制确保了机械手在铸造生产中的高速、高精度和全自动化。
4.检测与保护:机械手配备了工件检测感应装置,可以防漏夹产品而损坏模具。同时,在发生异常或故障时,机械手的控制系统会发出报警信号,并停止自动运行,以保护设备和工件的安全。例如当机械手抓取工件出现异常时,检测装置能及时感知并反馈给控制系统。
无锡精密铸造机械手哪家好?无锡自动浇注机械手报价是多少?无锡熔模铸造厂家质量怎么样?青岛天启自动化工程有限公司专业承接无锡精密铸造机械手,电话:134 7584 4782